Globally Convergent Newton’s Method
Contents
import mmf_setup
mmf_setup.nbinit()
import logging
logging.getLogger("matplotlib").setLevel(logging.CRITICAL)
%matplotlib inline
import numpy as np, matplotlib.pyplot as plt
This cell adds /home/docs/checkouts/readthedocs.org/user_builds/wsu-phys-581-computation/checkouts/fall-2021 to your path, and contains some definitions for equations and some CSS for styling the notebook. If things look a bit strange, please try the following:
- Choose "Trust Notebook" from the "File" menu.
- Re-execute this cell.
- Reload the notebook.
Globally Convergent Newton’s Method¶
For finding solutions to non-linear equations \(f(x) = 0\), Newton’s method can converge extremely quickly, roughly doubling the number of digits each step.
However, if the initial state is poorly chosen, it can converge very slowly, or even diverge. By carefully choosing both the form of \(f(x) = 0\) and the initial guess, one can often design an algorithm that will converge for all initial states with a few iterations at most. This is an art rather than a science. Here we show some examples.
Polynomial Inversion¶
An example came up in Random Variables when trying to invert the cumulative
distribution function \(C_Z(z) = (-x^3 + 3x + 2)/4\) corresponding to the Thomas-Fermi PDF
\(P_Z(z) = 3(1-z^2)/4\). The roots of a polynomial can be found quite efficiently with
numpy.roots(), but this returns all 3 roots, and in this case, we want a
specific one.
First we plot the function, and note that it is very well approximated by:
z = np.linspace(-1, 1)
P = np.array([-1, 0, 3, 2])/4
fig, ax = plt.subplots()
ax.plot(z, np.polyval(P, z), label=r"$C_Z(z)$")
ax.plot(z, (1+np.sin(np.pi*z/2))/2, ":", label=r"$[1+\sin(\pi z/2)]/2$")
ax.legend()
ax.set(xlabel="$z$", ylabel="$C_Z(z)$");
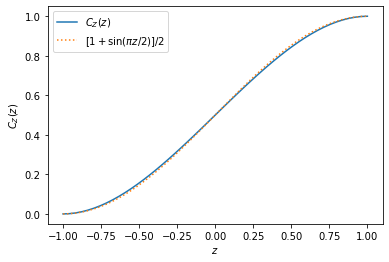
This suggests a globally convergent strategy for solving \(x = C_Z(z)\):
To check this, we see how many iterations it takes to reach a specified tolerance, and then plot this over the range of inputs:
P = np.array([-1, 0, 3, 2])/4
dP = np.polyder(P)
def C_Z(z):
return np.polyval(P, z)
def C_Z_inv(x, n):
"""Perform `n` steps of Newton's method to invert `x=C_Z(z)`"""
z = 2/np.pi * np.arcsin(2*x-1)
for _n in range(n):
z -= (np.polyval(P, z) - x) / np.polyval(dP, z)
return z
# Skip endpoints where denominator will be zero
z = np.linspace(-1, 1, 1000)[1:-1]
x = C_Z(z)
fig, ax = plt.subplots()
for n in [0, 1, 2, 3, 4]:
ax.semilogy(x, abs(C_Z_inv(x, n=n) - z), label=f"n={n}")
ax.legend()
ax.set(xlabel="$x$", ylabel="$|C_Z^{-1}(x)-z|$");
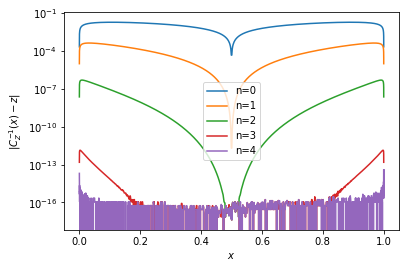
This shows that we achieve machine precision with 3 iterations if \(x \in [0.2, 0.8]\) and in 4 iterations everywhere else, except near the boundaries. Let’s look a little more closely there (noting that the behavior is symmetric):
# Skip endpoints where denominator will be zero
z = -1 + 10**(np.linspace(-8, 0, 100))
x = C_Z(z)
fig, ax = plt.subplots()
for n in [0, 1, 2, 3, 4]:
ax.loglog(x, abs(C_Z_inv(x, n=n) - z), label=f"n={n}")
ax.legend()
ax.set(xlabel="$x$", ylabel="$|C_Z^{-1}(x)-z|$");
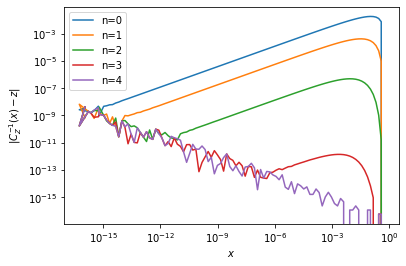
The fluctuations here seem to indicate that the issue at the boundary is actually due to roundoff error, so we have are finished with the following:
def C_Z(z, P=[-1, 0, 3, 2]):
return np.polyval(P, z)/4
def C_Z_inv(x, P=[-1, 0, 3, 2], dP=[-3, 0, 3]):
"""Invert `x=C_Z(z)`"""
z = 2/np.pi * np.arcsin(2*x-1)
for _n in range(4):
z -= (np.polyval(P, z) - 4*x) / (np.polyval(dP, z) + 1e-32)
return z
x = np.linspace(0, 1, 1000)
z = C_Z_inv(x)
assert np.allclose(C_Z(z), x, atol=1e-15)